盾构施工人工测量与自动测量技术探讨
| 杨鹏卫 杨光 侯玉国 (江苏省地质勘查技术院,江苏 南京 210049) |
| 摘要:文章介绍了上海市12号线顾戴路-东兰路区间φ6.34m土压平衡盾构在2.1km的掘进的过程中,为确保隧道顺利贯通,指导盾构沿设计轴线推进,所采用的人工测量与自动测量的方法及原理。 关键词:盾构 人工测量 自动测量 |
| 1 工程概况 顾戴路站~东兰路站区间:区间出顾戴路站端头井后下穿顾戴路北侧规划公园,自顾戴路折向万源路,然后沿万源路下向北进行,下穿万源路地块后,线路左、右线分离,分别从东西侧绕僻万源路桥桩基,下穿漕河泾港。过东兰路后进入东兰路站。 本段区间较长,里程范围为SK+411.527~SK5+080.520,长度为1668.993。上行线有五段曲线,曲线半径依次为370m、1200m、650m、1000m、1000m。线路纵断面最小坡度2‰,最大坡度25‰。隧道覆土最小为10.0m,最大为22.2m。本区间为双线单圆盾构区间,在最低点设置旁通道(兼排水泵站)1座。 2 盾构掘进测量 对于长隧道及曲线隧道施工来讲,确保掘进机(盾构)能正确地沿着设计轴线进行推进和贯通是最关键的问题。这一方面取决于地面控制测量的精度,另一方面更重要的是地下隧道测量、以及施工测量的精度和测量采用的技术手段。本工程采用人工测量和自动测量相结合的技术进行隧道施工测量。两套测量系统、相互校核,不断修正,主要相互验证测量数据计算的准确性和测量仪器的误差。 2.1 人工测量 2.1.1 盾构测量标志的安装及测定 测量标志由前靶、后靶、横向坡度、纵向坡度组成,具体实物为前后测量徕卡反射贴片和坡度板(纵向和横向坡度都可测),进行安装时,先测量出盾构的轴线,并把贴片和坡度板固定在盾构中心线上,前标后标应具有足够的长度,前靶距切口越近越好。测量出前靶、后靶始记录和校核记录,以免盾构标志数据中存在系统误差。 初次测量时,用仪器照准前、后占牌各测量一个测回,再根据坡度板的数值确定盾构的初始姿态,方便盾构始发及时纠正。 如图1为人工测量前后靶测设示意图,单位(mm): |
.jpg) |
| 图1 人工测量前后靶测设示意图 |
.jpg) |
.jpg) |
| 2.2 自动测量 为了做到对盾构机姿态的实时控制,盾构机掘进中采用盾构姿态自动监测系统。该系统是盾构机自动导向测量系统,采用ROBOTEC隧道导向系统,具有国际先进水平,适用于隧道工程施工控制的自动测量系统。采用该系统能够确保实时、准确地控制隧道掘进,保证贯通的精度。 2.2.1 自动测量导向系统 本自动测量系统安装了三个棱镜,前靶一个,后靶两个(只用一个,一个备用),安装测定与人工实测数据与其对比计算偏差。 如图2为自动测量系统硬件构成: |
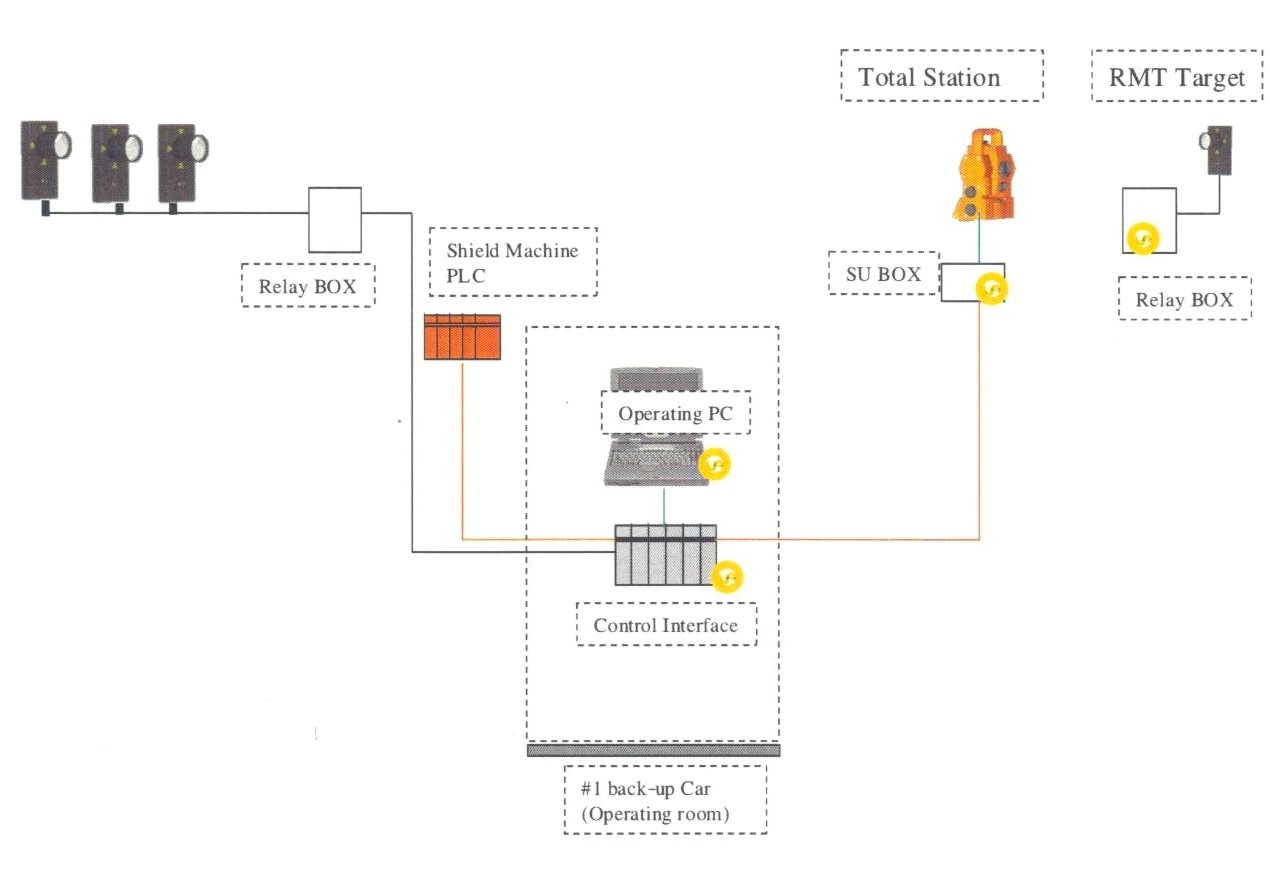 |
| 图2 自动测量系统硬件构成 |
| 如图3是ROBOTEC测量系统界面由此画面进行测量指令的发送及设定和信息反馈等。 |
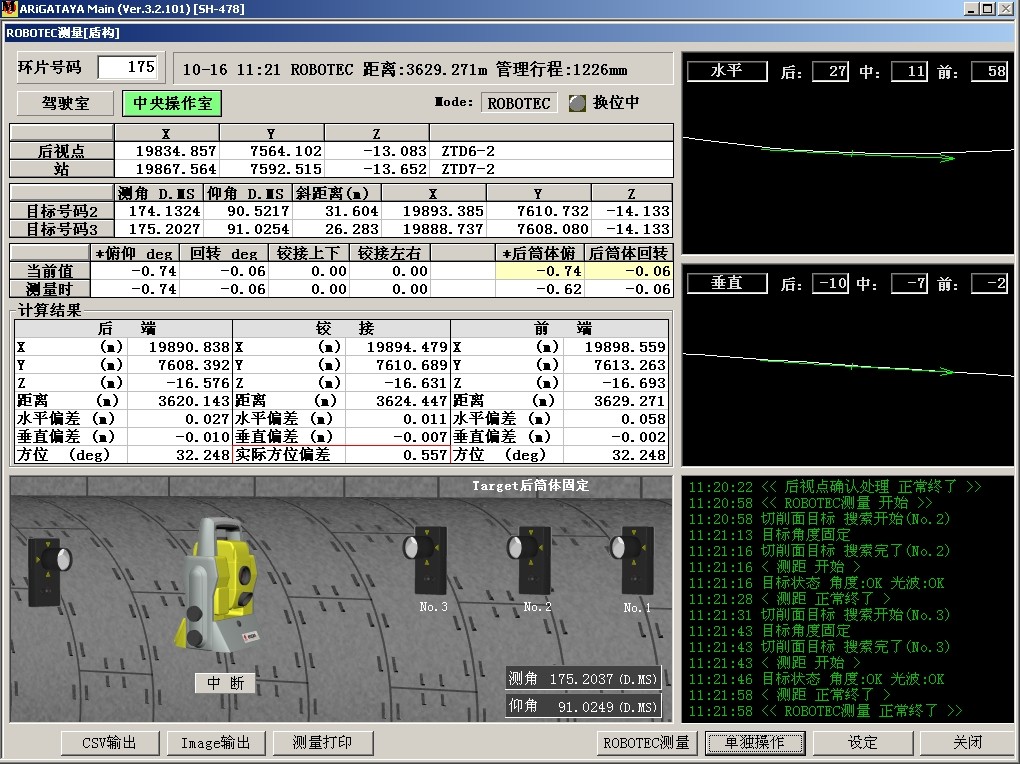 |
| 图3 ROBOTEC测量系统界面 |
| 2.2.2 自动测量盾构姿态计算原理 盾构机作为一个近似的圆柱体,在开挖掘进过程中我们不能直接测量其刀盘及盾尾的中心坐标,只能用间接法来推算出中心的坐标。 如图3,A点是盾构机刀盘中心,E点是盾构机盾尾断面中心点,即AE连线为盾构机的中心轴线,布置三个自动棱镜B、C、D。由A、B、C、D、四点构成一个四面体,在盾构始发前测量出B、C、D 三个角点的三维坐标(xi, yi, zi)和刀盘盾尾中心的三维坐标,建立几何关系。根据三个点的三维坐标(xi, yi, zi)分别计算出LAB, LAC, LAD, LBC, LBD, LCD, 四面体中的六条边长,作为以后计算的初始值,在盾构机掘进过程中Li是不变的常量。平偏航,垂直偏航,由B、C、D三点的三维坐标就能确定盾构机的仰俯角和滚动角,从而达到检测盾构机姿态的目的。 |
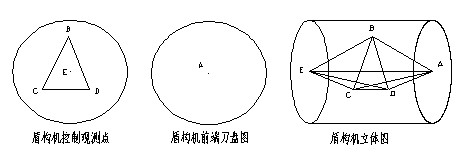 |
| 图4 盾构姿态计算原理图 |
| 3 两套测量控制技术的比较 and automatic measurement technology Abstract: This paper introduces the line 12 of Shanghai City Gu Dai Road - Donglan road interval of φ 6.34m earth pressure balance shield in the process of 2.1km development, to ensure smooth traffic tunnel, shield design guidance along the axis advance, manual measurement and automatic measuring method and principle. 参考文献 |

